1. Arduino uno
2. Bluetooth hc-05
3. Kabel jumper male to female secukupnya
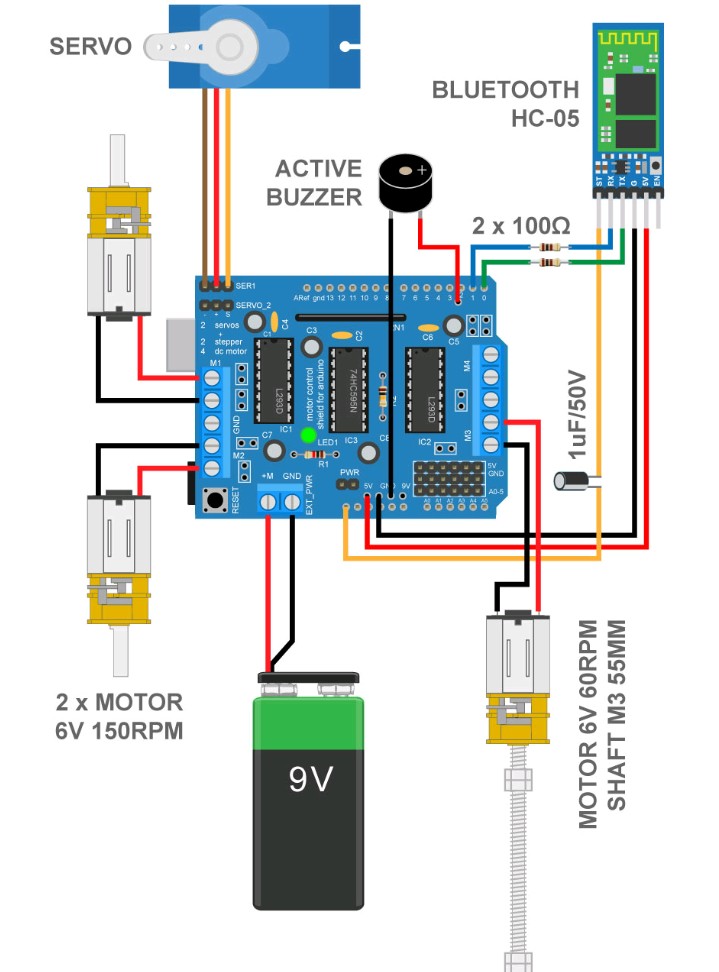
Rangkaian

Sebelum menghubungkan ke power 12 v pencet pushbutton pada modul Bluetooth hc-05 lalu hubungan power . Setelah kedipan led agak pelan lalu boleh lepas phusbutton, Lalu upload program di bawah ini.
Untuk pemograman
#include <SoftwareSerial.h>
SoftwareSerial BTserial(10,9); // TX | RX
void setup()
{
Serial.begin(9600);
Serial.print("Sketch: "); Serial.println(__FILE__); // Mengetahui Lokasi Sketch Arduino
Serial.print("Uploaded: "); Serial.println(__DATE__); // Mengetahui Tanggal Upload Sketch Ke Arduino
Serial.println("");
Serial.println("Untuk Memulai Ketik AT ya Bro");
BTserial.begin(38400);
}
void loop()
{
// Membaca Perintah dan menampilkanya ke serial monitor
if (BTserial.available())
Serial.write(BTserial.read());
if (Serial.available())
BTserial.write(Serial.read());
}
SoftwareSerial BTserial(10,9); // TX | RX
void setup()
{
Serial.begin(9600);
Serial.print("Sketch: "); Serial.println(__FILE__); // Mengetahui Lokasi Sketch Arduino
Serial.print("Uploaded: "); Serial.println(__DATE__); // Mengetahui Tanggal Upload Sketch Ke Arduino
Serial.println("");
Serial.println("Untuk Memulai Ketik AT ya Bro");
BTserial.begin(38400);
}
void loop()
{
// Membaca Perintah dan menampilkanya ke serial monitor
if (BTserial.available())
Serial.write(BTserial.read());
if (Serial.available())
BTserial.write(Serial.read());
}
// Kode-Kode yang biasa digunakan
// AT + UART = 9600,0,0 //Ganti baudrate di Serial Begin
// AT + UART? // Mengecek Baudrate Modul Bluetooh
// AT + PSWD? // Mengecek Password Bluetooth
// AT + PSWD="Isi Sendiri Password" //Ganti password Modul Bluetooth
// AT + NAME? // Mengecek Nama Modul Bluetooth
// AT + NAME = "Rubah Nama Disini" // Ganti Nama Modul
// AT + UART = 9600,0,0 //Ganti baudrate di Serial Begin
// AT + UART? // Mengecek Baudrate Modul Bluetooh
// AT + PSWD? // Mengecek Password Bluetooth
// AT + PSWD="Isi Sendiri Password" //Ganti password Modul Bluetooth
// AT + NAME? // Mengecek Nama Modul Bluetooth
// AT + NAME = "Rubah Nama Disini" // Ganti Nama Modul
Klik serialmonitor pada aplikasi arduino ide, atur Both NL & OR baudrate 9600 lalu ketik "AT" lalu enter. Bila di serial monitor "OK", berarti sudah benar.

Bila ingin mengganti nama ketik "AT+NAME=HALLO" Lalu enter.
Bila ingin ganti pasword ketik "AT+PSWD=0806" lalu enter. Maka Pasword dan nama sudah diganti... Buka android aktifkan Bluetooth maka akan muncul HALLO lalu ketik Pasword 0806... Dan berhasil.. Catatan nama dan Pasword Bluetooth terserah anda.
------------------------------------------------------ Selamat mencoba dan semoga berhasil.... Dan bermanfaat......
---------------------------------------------------
Video Cara ganti nama dan Pasword modul Bluetooth hc-05