

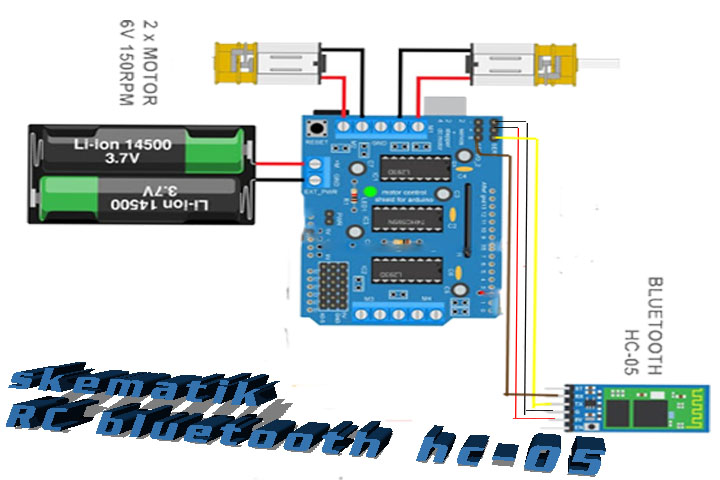
Hay.... Kali ini kita akan membahas Mobil RC Kontrol Jarak Jauh Bluetooth hc-05 arduino. Inti dari hampir setiap proyek robotika adalah kendali jarak jauh. Dengan menggunakan beberapa sketsa sederhana, kami akan mengatur mobil untuk merespons data Serial yang dikirimkan dari ponsel Android Anda. Anda akan belajar cara membaca banyak informasi dari satu perintah serial sehingga Anda dapat menggunakan Serial Monitor (melalui bluetooth) untuk memberi tahu robot arah bergerak dan seberapa jauh untuk bergerak.
Bagian Tambahan Dibutuhkan
Pada mobil remote control ini Anda tidak memerlukan part 3d tambahan untuk dicetak.
Untuk pemograman adalah :
#include <AFMotor.h>
#include <SoftwareSerial.h>
AF_DCMotor MotorL(1); // motor Left M1
AF_DCMotor MotorR(2); // motor Right M2
const int rxpin = 10;
const int txpin = 9;
SoftwareSerial mySerial(rxpin, txpin); byte _data, _dataLast;
byte kec;
void maju(){
MotorL.run(FORWARD);MotorR.run(FORWARD);
MotorL.setSpeed(255);
MotorR.setSpeed(255);
}
void mundur(){
MotorL.run(BACKWARD);MotorR.run(BACKWARD);
MotorL.setSpeed(255);
MotorR.setSpeed(255);
}
void kiri(){
//belok kiriMotorL.run(BACKWARD);
MotorR.run(FORWARD);
MotorL.setSpeed(255);
MotorR.setSpeed(255);
}
void kanan(){
MotorL.run(FORWARD); MotorR.run(BACKWARD);
MotorL.setSpeed(255);
MotorR.setSpeed(255);
}
void _stop(){
MotorL.run(RELEASE);MotorR.run(RELEASE);
}
void all_off(){
while (_data != 'S'){
_data=mySerial.read();} }
void setup()
{ mySerial.begin(9600);
while (_data != 'S'){_data=mySerial.read();}
}
void loop(){
/*=================== _data
Forward - > F
Back - > BLeft - > L
Right - > R
Stop - > S
Stop All - > D
===========================*/
_data=mySerial.read();
if(_data != 255){//Serial.println(char(_data));
if(_dataLast != _data){
_stop();
}
_dataLast=_data;
switch (_data){case 'F' : maju(); break;
case 'B' : mundur(); break;
case 'L' : kiri(); break;
case 'R' : kanan(); break;
case 'S' : _stop(); break;
case 'D' : all_off(); break;
} } }
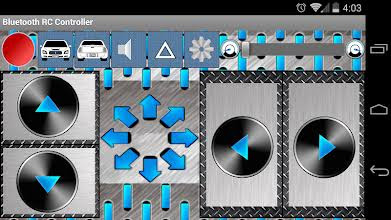
Yang Harus Anda Lihat
Setelah mengunggah sketsa, buka remote control di aplikasi ini arduino rc bluetooth car, klo belum ada download diplaystore.

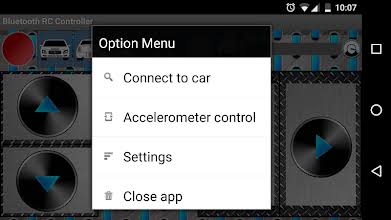
Klik option menu, dan klik connect to car

Ini digunakan sebagai petunjuk antarmuka pengguna. Ketuk satu tombol pada antarmuka untuk mengirim perintah. Motor harus mulai berbergerak. Tergantung tombol apakah Anda menekan nilai yang Anda kirim ke robot akan bergerak maju, mundur, kiri atau kanan, masing-masing.
Jika Anda mendapatkan gerakan robot tidak bergerak lurus, Anda dapat mengkalibrasi motor gerak dengan mengatur setiap kecepatan motor pada menu.
Untuk videonya ada dibawah ini...











0 komentar:
Post a Comment